CDS 240, Spring 2016: HW 3
| R. Murray, J. Doyle | Issued: 2 May 2016 (Mon) (updated 4 May) |
| CDS 240, Spring 2016 | Due: 11 May 2016 (Thu) |
- MLS, Problem 4.1

Derive the equations of motion for a pendulum on a wire: an idealized planar pendulum whose pivot is free to slide along a horizontal wire. Assume that the top of the pendulum can move freely on the wire.
- MLS, Problem 6.1
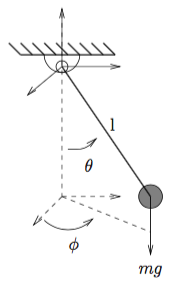
Calculate the dynamics of a spherical pendulum using the Lagrange-d'Alambert equations. The system consists of a mass suspended from a rigid wire that is free to pivot in any direction at its point of attachment (a spherical joint). Choose as your primary coordinates the xy position of the bottom of the pendulum.
- (updated 4 May) Consider a constrained Lagrangian system with
Show that substituting the constraints into the Lagrangian and then applying Lagrange's equations (without constraints) gives the incorrect equations of motion.
- A planar pendulum (in the x-z plane) of mass and length hangs from a support point that moves according to . Find the Lagrangian, the Hamiltonian, and write the first-order equations of motion for the pendulum.


- Perko, Section 2.14, problem 1(a)
Show that the systemis a Hamiltonian system with one degree of freedom; i.e., find the Hamiltonian function for this system.
- MLS, Problem 7.2
Show that the differential constraint in given byis nonholonomic.
- MLS, Problem 7.7
A firetruck can be modeled as a car with one trailer, with the difference that the trailer is steerable, as shown in the figure below.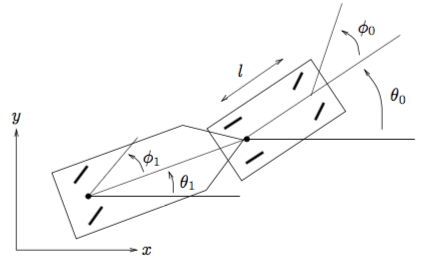
The constraints on the system are similar to that of the car in Section 7.3 of MLS, with the difference that back wheels are steerable. Derive the nonlinear control system for a firetruck corresponding to the control inputs for driving the cab and steering both the cab and the trailer, and show that it represents a controllable system.

