|
|
| (20 intermediate revisions by 3 users not shown) |
| Line 1: |
Line 1: |
| This page contains a draft description of the TuLiP toolbox. | | This page contains a draft description of the TuLiP toolbox. |
| | |
| | == Architecture == |
| | |
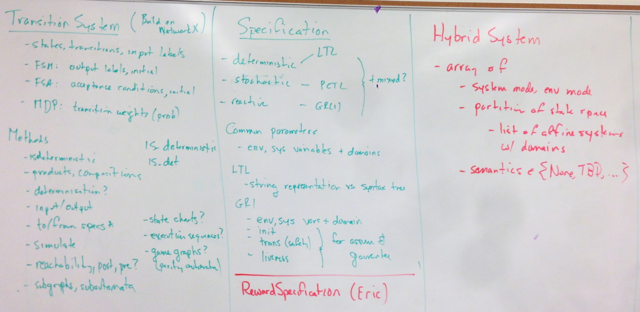
| | Notes from 30 April 2013 meeting: |
| | |
| | [[Image:tulip-planning_30Apr13.jpg|640px]] |
|
| |
|
| == Examples == | | == Examples == |
| This section contains a set of example that illustrate how the TuLiP code should be structured. This goes first so that we focus on the TuLiP interface and functionality and then figure out what is required to support it. | | This section contains a set of example that illustrate how the TuLiP code should be structured. This goes first so that we focus on the TuLiP interface and functionality and then figure out what is required to support it. |
|
| |
|
| === Load up an example stored in files and synthesize a controller ===
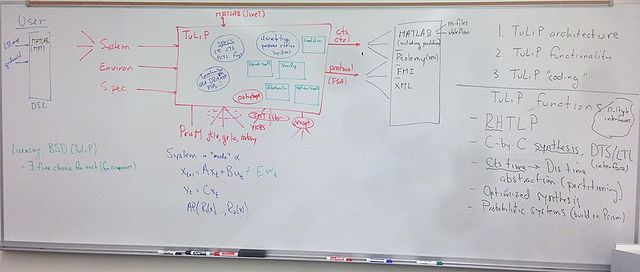
| | Notes from 14 May meeting: |
| This example shows how to load up a problem that is specified in files and synthesize a controller. Save the controller to a file, but also generate a version that can be executed in Ptolemy.
| |
| | |
| ==== Code ====
| |
| <pre>
| |
| import tulip
| |
| | |
| # Load up the system and environment descriptions, plus specifications
| |
| system = tulip.ts.load("robot-discrete.tsf")
| |
| environment = tulip.sp.load("robot-env.spf")
| |
| specs = tulip.sp.load("robot-specs.spf")
| |
|
| |
|
| # Synthesize a controller
| | [[Image:tulip-planning_14May13.png|640px]] |
| controller = tulip.syn.jtlv(system, environment, specs)
| |
|
| |
|
| # Save the controller in TuLiP and Ptolemy formats
| | == TuLiP classes == |
| tulip.ts.save("robot-control.tsf")
| |
| tulip.ptolemy.savefsm("robot-control.fsm")
| |
| </pre>
| |
|
| |
|
| ==== Notes ====
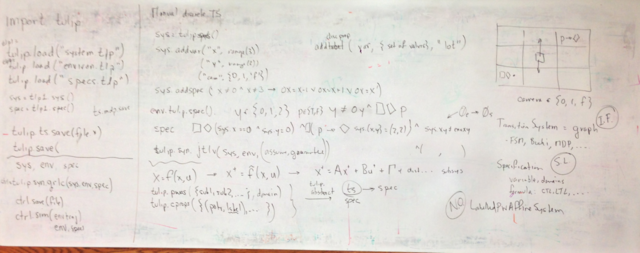
| | Notes from 23 May meeting: |
| # The <tt>.tsf</tt> (transition system file) and <tt>.spf</tt> (specification file) formats are the default TuLiP file formats.
| |
| #* Alternatively, perhaps we have a single file format <tt>.tlp</tt> and then use <tt>tulip.load</tt> and <tt>tulip.save</tt> to read and write. The type of object would just be part of the file specification. --[[User:Murray|Richard Murray]] ([[User talk:Murray|talk]]) 15:07, 11 May 2013 (PDT)
| |
| # The <tt>tf</tt> module contains data types and functions for representing different types of transition systems. Multiple transition systems are supported, including deterministic transition systems, Markov decision processes, Kripke structures, Rabin automata, etc.
| |
| # The <tt>sp</tt> module contains data types and functions for representing specifications. Multiple temporal logics, including LTL, MTL, CTL, PCTL, TCTL, STL, etc are supported.
| |
| # The <tt>syn</tt> module contains interfaces to various synthesis tools. Supported tools include JTLV, gr1c and PRISM. The input arguments must be compatible with the synthesis tool, but all arguments should be core TuLiP objects.
| |
| #* Would it make more sense to have a module for each program we support? So this line would become <tt>tulip.jtlv.syn</tt>? --[[User:Murray|Richard Murray]] ([[User talk:Murray|talk]]) 15:07, 11 May 2013 (PDT)
| |
| # The <tt>ptolemy</tt> module contains functions for interfacing with Ptolemy.
| |
| #* Should we instead make an FMI interface and then use Ptolemy's FMI capability? --[[User:Murray|Richard Murray]] ([[User talk:Murray|talk]]) 15:09, 11 May 2013 (PDT)
| |
|
| |
|
| === Create an example from scratch ===
| | [[Image:tulip-planning_23May13.png|640px]] |
This page contains a draft description of the TuLiP toolbox.
Architecture
Notes from 30 April 2013 meeting:
Examples
This section contains a set of example that illustrate how the TuLiP code should be structured. This goes first so that we focus on the TuLiP interface and functionality and then figure out what is required to support it.
Notes from 14 May meeting:
TuLiP classes
Notes from 23 May meeting: